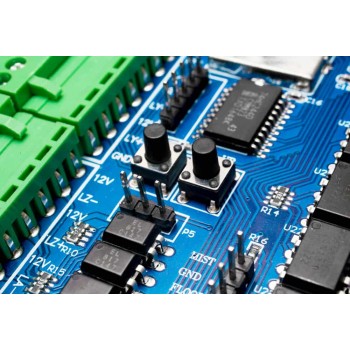
The UDB5 (UAV Development Board version 5) comes populated with a dsPIC33FJ256 CPU, and the impressive MPU-6000, a MEMS 3-axis gyroscope and 3-axis accelerometer. The on-board Invensense gyro even has enough vibration tolerance to be used in RC heli applications.
By itself, the board can be used to develop a three axis IMU controller. By addition of an EM406 or D2523T GPS receiver, it can be used to develop a UAV controller for an RC car, plane, helicopter, or boat. It comes with self-testing firmware that can serve as a starting point for you to develop your own control and navigation firmware. There is even fully functional, open source autopilot firmware available. Few changes to the UDB5, removed the MMA7361 three axis accelerometer, the dual axis IDG500 gyro, and the single axis ISZ500 gyro and moved to an MPU-6000. The PCB form factor hasn’t changed. If you like, you can add a reset button and/or a 0.2F super cap.
Note: For programming, we recommend the PICkit3.
Note: A GPS module is not included.
Features:
compatible with 20-channel EM-406A SiRF III GPS
compatible with 48-channel EM-506 GPS with SiRF Star IV chipset
compatible with 50-channel GS407 Helical GPS
dsPIC33FJ256GP710A Controller (with onboard 3.3V and 5V glue logic)
dsPIC runs at 80MHz (40 MIPS) with 8MHz resonator and PLL
MPU-6000 MEMS 3-axis gyroscope and 3-axis accelerometer
External 256Kbit EEPROM
Up to 8 Input, 8 output PWM points
6-wire debug header or ICSP header
4 separate colored status LEDs
On board 3.3V and 5V regulators (150mA max)
Spare USART connection for debugging, flight logging, wireless telemetry, etc.
I/O pins include a CAN, an I2C, and a SPI port
30 spare analog and digital I/O pins for debugging and interfacing to sensors
This is the new PICkit 3. The PICkit 3 allows debugging and programming of PIC and dsPIC microcontrollers using the powerful graphical user interface ..
Designed for serious quad racers and freestyle maniacs, the AfroFlight Naze32 flight controller is undeniably the most used, recognised and supported ..
This is the new APM 2.8 flight controller. The sensors are exactly the same as the APM 2.6 flight controller however this has the option to use the bu..
PreviousNextAll-In-One DesignFor entry-level enthusiasts, DJI now brings out the most cost-effective solution, the NAZA-M Lite flight control system. ..
The Pixhawk 32-Bit Autopilot System for Autonomous Vehicles from 3D Robotics is essentially a very specialized computer that provides flight control f..
RoMeo V2 [R3] is an All-in-One Arduino based robot board, it is especially designed for robotics applications, and extended devices. Romeo benefits fr..


















 Flight Controller for Quadcopters")

")
")

 with Motor Driver")
 with Motor Driver")

